1. Espaces non-euclidiens, discrétion et optimisations.
La dernière décennie a vu une attention croissante portée aux différences entre nos façons de représenter l’espace de manière territoriale et topographique d’un côté, et nos façons de l’habiter comme membres de rhizomes et de réseaux complexes de relations humaines. Cette analyse fut notamment développée par le laboratoire Chôros (désormais le rhizome Chôros), avec des réflexions sur les caractères non-euclidiens du monde (Lévy, 2012 ; Lévy et Lussault 2013 ; Poncet, 2017). Par exemple, la distance euclidienne — et les objets mathématiques basés sur cette distance comme les aires — donne une vision biaisée de la manière qu’ont les humains d’évoluer dans les espaces qui les entourent, en en limitant la compréhension ; la distance temporelle jouant généralement un rôle plus critique que la distance euclidienne topographique (Lévy, 2009).
Cet article vise à étendre les analyses sus-citées en utilisant une démarche plus ethnographique, en se concentrant sur des groupes sociaux pour lesquels les propriétés non-euclidiennes de l’espace sont amplifiées (ici, les personnes ayant des incapacités [1] diverses). Ce travail sera donc basé sur des observations ethnographiques, formalisées et systématisées via une intuition mathématique et les travaux précédents de Chôros. Cet article n’étant pas à priori écrit à destination de mathématiciens, nous éviterons le jargon [2] autant que possible, mais devons tout de même définir plusieurs propriétés mathématiques de base. Nous analyserons donc un certain nombre d’objets différents, depuis les ensembles discrets de points jusqu’aux espaces euclidiens, non seulement comme espaces propres mais aussi comme supports pour des fonctions de coût (représentant le temps ou l’argent nécessaire pour traverser ces espaces). Par exemple, un espace sera considéré euclidien (une sous-famille des espaces métriques) si le temps nécessaire pour aller de A à B est approximativement proportionnel à la distance (métrique) entre les deux. Un espace sera donc non-euclidien s’il comporte des discontinuités, par exemple une frontière (dans un sens non seulement géopolitique mais aussi topographique). En pratique, une frontière entre deux États sans accord de libre circulation crée une telle discontinuité (une frontière topologique en utilisant la terminologie de Lévy, Maitre, et Romany, 2016), auquel cas traverser la frontière implique un coût arbitrairement élevé. Le sol lui-même est un autre exemple de frontière, limitant généralement nos déplacements à un espace presque 2-dimensionnel. Les changements soudains affectant le temps, l’argent ou l’effort nécessaire pour aller d’un lieu à un autre seront donc comptés comme des discontinuités.
Lorsqu’on discrétisera des objets, comme dans les figures faisant apparaître des coûts temporels — où les temps sont regroupés en clusters de 5 minutes — une discontinuité correspondra alors au fait de passer directement d’un cluster (coûtant 5 minutes) à un autre non-adjacent (coûtant 15 minutes), sans passer par une zone de transition à 10 minutes. La discrétion jouera aussi un rôle quand on considérera des objets finis et indépendants — comme des lieux à la place d’espaces — et des propriétés binaires étant vraies ou fausses (et non pas sur une échelle continue de valeurs de vérité). Cela servira principalement aux réflexions sur les coûts, par exemple le coût d’optimisation d’une trajectoire. Dans de tels contextes, on sait que les problèmes discrets sont très généralement plus difficiles à optimiser que leurs équivalents continus [3]. Naturellement, tout espace vécu possède des discontinuités, mais notre argument principal est que, alors que la majeure partie de la population vit l’espace de manière continue sans en prendre conscience, les déficiences font apparaître des discontinuités quel que soit le contexte et l’échelle [4], pour une large gamme de paramètres, ce qui jouera aussi un rôle comme facteur de coût supplémentaire.
Avant d’aborder le cœur de l’article, il est temps d’expliquer quelques décisions méthodologiques et terminologiques, et définir plusieurs termes. Tout d’abord, nous suivons Alexandre Baril et Robert McRuer dans l’utilisation du mot [5] “crip”, mot dérivé de “cripple” que l’on pourrait traduire approximativement par “estropié” mais ayant acquis des connotations fortes suite à la réappropriation du terme par certaines communautés et à son utilisation académique (McRuer, 2006 ; Baril, 2016). On suivra ainsi un processus de cripping en analysant des concepts pré-existants dans une optique centrée sur l’expérience vécue du handicap, en adoptant ainsi des pratiques ethnographiques.
Suivant ces pratiques, les expériences et témoignages des concernés doivent être au centre de l’argumentation. Cela ne suit pas la convention habituelle correspondant à citer des travaux de recherche publiés. Hélas, les chercheurs handicapés — dont seule une petite partie s’attaque à ce type de sujets — sont fortement minoritaires dans le milieu de la recherche [6], et le domaine n’attire par ailleurs presque aucun chercheur non handicapé. Cet article se basera donc, en plus de l’expérience personnelle de l’auteur, sur un certain nombre de témoignages et d’analyses recueillies au sein de la communauté, souvent sous la forme de réflexions sur Twitter et Tumblr.
Sur le plan terminologique, on utilisera “crip” pour parler d’une personne ayant une incapacité arbitraire. “Roulant” sera utilisé plus spécifiquement pour parler de personnes utilisant des fauteuils — qu’ils soient électriques ou manuels. Le terme “marchant” [7] sera utilisé par contraste pour une personne marchant généralement là où elle va (et pouvant monter des marches). Même si les arguments avancés engloberont tous types d’incapacités [8], les roulants — et particulièrement ceux qui utilisent un fauteuil électrique — seront généralement au centre de l’argument, pour la simple raison que l’auteur a une plus grande familiarité personnelle avec cette expérience (étant une roulante).
2. Des corps discrets dans des espaces inhabituels.
2.1 Des points de vue contraints.
La première particularité des roulants est qu’ils sont beaucoup plus restreints à un espace bidimensionnel que les marchants (qui ont au moins partiellement accès à trois dimensions). Cela n’affecte pas uniquement le mouvement, mais aussi la perception de l’environnement (Mairs, 1996 ; Toombs, 1995). Ici, le problème n’est pas la présence d’une marche ou d’un escalier, mais la position de la tête — et donc des yeux. Se baisser et se lever sont des tâches souvent difficiles pour un roulant, voire impossible pour certains (qui peuvent être paralysés ou attachés à leur fauteuil). Cela crée une contrainte forte sur la hauteur et les angles pouvant être utilisés pour observer le monde. Cette restriction peut sembler secondaire mais elle a des effets surprenants quand elle est permanente. Par exemple, si le roulant se lève — ou se retrouve en hauteur — il lui devient soudain possible de comparer la taille des personnes qui l’entoure, activité difficile depuis une position assise. Cela n’a heureusement pas à priori de conséquences importantes — quoique la taille a tendance à affecter les décisions prises dans les relations professionnelles et romantiques ; il serait alors peut-être intéressant de voir si ces effets subsistent quand la personne prenant les décisions utilise un fauteuil roulant (Agerström, 2014).
Sur un plan plus pratique, on trouve de nombreux objets avec lesquels la roulante est censée interagir : les textes gravés sur des tables hautes, les machines de vote électronique situées en hauteur, ou bien simplement les loupes fixes de bureaux de vote qui nécessitent de se pencher depuis une position debout (Runyan, 2007). Le problème contraire a aussi lieu, et les messages inscrits sur le sol ne sont pas forcément plus facile à lire que s’ils étaient au plafond.
Cette tendance à optimiser les objets interactifs pour l’utilisation des marchants est parfois — mais très rarement — inversée. Un exemple récent fut l’exposition permanente “Being Human” de la collection Wellcome (Marshall, 2019 ; Voon, 2019), la première exposition médiatisée à être conçue en optimisant l’expérience des crips. Elle faisait suite à une plus petite exposition appelée “Can you see us Vancouver” organisée deux ans plus tôt (Correia, 2017). Dans celle-ci, les peintures étaient exposées entre 25 et 36 centimètres en dessous de leur position habituelle, créant un angle de vision optimisé pour quelqu’un d’assis. Un des buts était probablement alors de montrer aux marchants l’effet étrange que ce changement de perception créait, remettant en question l’universalité présupposée de leur point de vue. D’une certaine manière, au-delà de la nouveauté liée au fait d’optimiser l’expérience pour les crips, cette exposition peut être vue comme une répétition des formations où les marchants utilisent un fauteuil roulant pendant une journée pour se rendre compte des difficultés que cela pose — formations pouvant hélas avoir des effets contre-productifs (Nario-Redmond, Gospodinov, et Cobb, 2017).
2.2 Mouvements algorithmiques.
Le deuxième aspect de cette spatialité discrète va au-delà du corps comme objet statique et concerne sa dynamique. Seule une partie des crips vit régulièrement cette expérience, mais c’est un phénomène présent dans de nombreuses vies de crips. L’exemple principal ici est celui d’une personne qui, ayant été immobilisée pendant une période plutôt longue (voire depuis sa naissance), apprend de nouveaux mouvements ou de nouvelles techniques de mouvements (Mauss, 1934), comme la marche à pied [9]. Sans la mémoire musculaire appropriée, cela requiert la coordination de nombreux mouvements. Contrairement au pianiste qui peut répéter ses gammes à un tempo inférieur, cette crip ne peut pas ralentir ses mouvements. Courir efficacement, sans gâcher son énergie, — ainsi que marcher, même si de manière plus limitée — dépend de la capacité à être perpétuellement dans un état de déséquilibre partiel. Cet état n’est cependant pas atteignable pour la crip qui n’a pas encore les réflexes pour rétablir son équilibre. Elle doit alors décomposer ses mouvements, afin d’être toujours en équilibre, et contrôler consciemment chaque action de ses muscles. Chaque membre se déplace alors suivant une trajectoire précise en fonction d’un algorithme conscient qui deviendra potentiellement un jour suffisamment internalisé pour devenir inconscient. En attendant, la décomposition du mouvement et les arrêts fréquents pour retrouver son équilibre empêchent la crip de conserver son inertie et rendent ainsi le mouvement plus lent et plus énergivore. C’est le premier cas où l’on peut observer l’effet mentionné à la section 1, où le mouvement continu et inconscient du marchant donne un grand gain d’efficacité par rapport au mouvement discrétisé du crip.
Ce n’en est qu’un exemple, mais ce type de décomposition de l’action se retrouve dans de nombreuses situations. Cela inclut notamment la construction de la parole, que ce soit pour le traitement du bégaiement où cacher ces problèmes de discrétisation a un fort coût cognitif (Dayalu et Kalinowski, 2002), ou bien pour la synthèse algorithmique de la parole rendue célèbre par Stephen Hawking.
2.3 Espaces personnels altérés.
La plupart des arguments de cet article concernent la restriction des espaces explorables ou visibles comme conséquence du handicap. Cependant, un effet inverse peut apparaître dans certains cas, où l’espace du crip n’est pas restreint mais transformé voire étendu. L’exemple principal correspond à l’espace personnel, qui est ressenti par les crips de toutes sortes, non seulement à cause de l’incapacité mais surtout à cause des réactions du monde qui les entoure. Trois éléments principaux affectent cette perception de l’espace personnel, que nous allons aborder ci-dessous.
Le premier élément est une perception altérée de soi, qui se manifeste de plusieurs manières. Par exemple, l’absence d’informations sensorielles dans certaines parties du corps — comme suite à un accident affectant la colonne vertébrale — peut modifier la proprioception. Dans l’autre sens, de nombreux crips étendent cette notion de soi aux prothèses qu’ils utilisent, correspondant partiellement au concept d’extension mentionnée par Myriam Winance (2003). Par exemple, les roulants étendent souvent leurs sens (typiquement le toucher et la proprioception) à leur fauteuil, une forme d’incorporation de la technologie. Ils sont donc capables de “sentir” quand quelqu’un le touche — par le biais des vibrations engendrées — avec naturellement une précision limitée. C’est encore plus marqué pour les personnes ayant des prothèses remplaçant des membres, notamment quand celles-ci intègrent un mécanisme de feedback. Cette extension du corps et de la perception de soi à travers des aides technologiques a hélas un défaut : les protections légales qui concernent les membres organiques ne s’appliquent généralement pas aux prothèses. La plupart des systèmes légaux restent encore flous sur ces questions, et considèrent les dégâts sur les prothèses comme des préjudices matériels et non pas corporels (MacDonald Glenn, 2012). Cette situation devient de plus en plus complexe au fur et à mesure que les prothèses se développent et se personnalisent, n’étant plus remplaçables telles quelles, le cerveau du crip s’étant habitué aux particularités de la prothèse.
Le deuxième élément vient d’une altération de la notion d’espace personnel, basée sur la perception du soi incarné (ou de l’identité corporelle). La notion d’espace personnel dépend ainsi apparemment de la capacité à se mouvoir. En Europe, se tenir debout à un mètre en face d’un fauteuil ou d’un scooter électrique ne semble ainsi pas agressif à priori, cette distance étant bien supérieure à ce qui est considéré comme les limites de l’espace personnel (Sorokowska et al., 2017). Cependant, cette présence proche peut restreindre fortement la capacité de manœuvre du roulant et l’immobiliser. Se tenir debout derrière un fauteuil a des effets similaires et bien supérieurs à ceux provoqués lorsqu’on se tient juste derrière un marchant. Les personnes malvoyantes, qui n’ont pas forcément la capacité de percevoir efficacement l’espace autour d’elles — ce qui peut être dangereux en cas de mouvement brusque — ont aussi une sensation altérée de l’espace personnel (Eaton, Snook-Hill, et Fuchs, 1997).
Le dernier élément vient de l’habitude de voir son espace personnel envahi à répétition, et de l’impact cumulé de cette transgression. Alors même que l’espace personnel est souvent étendu, les marchants ont souvent l’impression qu’il est réduit, et donnent à leurs interlocuteurs crips moins d’espace quand ils interagissent avec eux (Kilbury, Bordieri, et Wong, 1996). Un aspect encore plus critique est que l’autonomie [10] du crip est perpétuellement remise en question, ce qui se manifeste, au-delà des intrusions dans l’espace personnel, par des contacts prolongés non-consentis, comme lorsqu’un marchant attrape de force les poignées d’un fauteuil roulant et le déplace malgré les protestations de son occupant (Mason-Bish et Kavanagh, 2019).
2.4 Une autonomie nécessaire pour l’exploration.
Cette notion d’autonomie est centrale à de nombreux argument dans ce qui suit, et elle a été (et reste) fondamentale dans le combat pour le droit des crips. Encore aujourd’hui, le droit à l’autonomie des crips — corporelle comme spatiale — reste dans un état lamentable. Un point qui distingue ce combat d’autres luttes civiques (comme celui sur le harcèlement de rue) est le quasi-consensus, parmi les personnes valides, sur le fait que les restrictions sur l’autonomie physique [11] des crips sont à la fois naturelles et méritées (Mason-Bish et Kavanagh, 2019).
Par exemple, le fait d’aider quelqu’un paraissant en difficulté avec un fauteuil roulant est souvent considéré non pas comme un acte approprié mais comme un impératif moral. Cela a des impacts dans des situations peu critiques, comme lorsqu’une roulante commence à ouvrir une porte. Si le bâtiment est public, il peut être très difficile d’éviter le fait de se faire aider. Même si l’intention est louable, elle entraîne souvent une intrusion dans l’espace personnel et un manque de prévoyance, comme quand le marchant ouvre la porte tout en se tenant sur le pas, comme illustré sur la Figure 1. Le problème est alors que, même en répétant de nombreuses fois que l’aide est superflue, le marchant ne cesse d’aider que rarement. La seule solution reste alors généralement d’informer le marchant qu’il est sur le chemin et n’est donc pas en train d’aider mais plutôt de gêner, auquel cas la réaction fréquente est un refus de considération des besoins exprimés de la personne qu’il voulait aider, puisqu’il se sent attaqué alors qu’il réalisait un acte qui dans son système de valeur, ne devrait lui apporter que de la reconnaissance sociale.
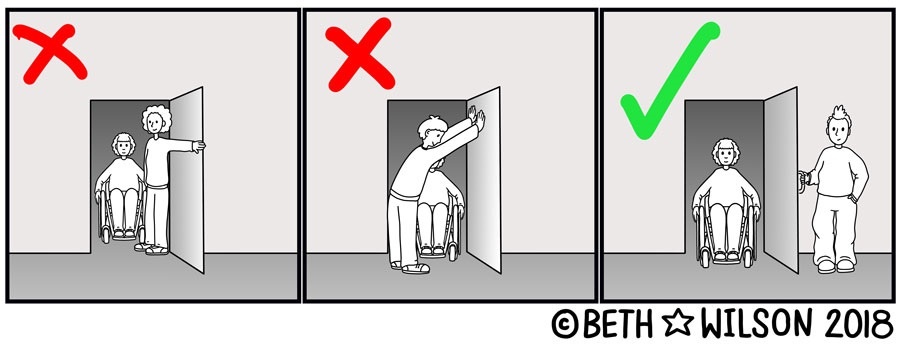
Un croquis de Beth Wilson (www.doodlebeth.com) illustrant les différentes manières contre-productives d’aider un roulant à passer une porte.
Cet énervement face à la non-opportunité d’aider s’est manifesté dans les réactions publiques (notamment en ligne) face aux actions de Sarah Waters. Cette activiste décida ainsi d’installer des picots sur les poignées de son fauteuil, pour empêcher les marchants de l’attraper pour la pousser (Brazell, 2019), une idée accueillie chaleureusement et copiée dans la communauté roulante. De nombreux marchants réagirent alors négativement, trouvant ce procédé trop agressif, surtout en considérant qu’il n’affecte que les personnes bienveillantes. Plusieurs mouvements ont récemment fait surface pour discuter de ces questions, notamment dans la communauté des malvoyants avec le hashtag #JustAskDontGrab (« demandez au lieu d’attraper » en français) (Kavanagh, 2018).
Même le simple fait de rester assis dans la rue à lire un livre en écoutant de la musique dans son casque n’est pas considérée comme une activité neutre. Par exemple, être en train de téléphoner devant un bâtiment (et pas juste devant sa porte) est généralement considéré comme une invitation : le crip immobile est interprété comme un crip en détresse, qu’il est donc normal d’interrompe afin de voir s’il a besoin d’aide. Le déni d’autonomie est donc l’état par défaut de nombreux crips [12].
Les exemples précédents étaient bénins, entraînant au maximum une perte de temps, ou de sang-froid, mais les conséquences peuvent parfois être plus graves. L’aide non-experte est ainsi souvent préjudiciable, et potentiellement dangereuse. Pousser un fauteuil sans prévenir son utilisateur peut casser ses doigts s’ils étaient sur la roue (ce qui est leur position par défaut). Essayer de soulever quelqu’un (qui peut être assis ou au sol) par un de ses membres sans le consulter avant peut aussi entraîner des dommages permanents. Au-delà des personnes non-expertes, même celles qui devraient avoir un entraînement minimum reçoivent parfois des instructions erronées. Typiquement, le personnel des compagnies aériennes reçoit l’instruction d’attraper la crip si elle tombe, et n’ont que rarement pour consigne de demander à la personne la manière optimale de lui porter assistance [13].
Deuxièmement, et plus crucialement quand il s’agit d’exploration de l’espace, cette négation de l’autonomie crée plusieurs coûts additionnels pour le crip dans l’espace public. Tout d’abord, le risque permanent de voir son autonomie remise en question et de se faire interrompre crée une charge mentale et un stress lié au fait de devoir toujours être prêt à faire face à ces interactions sociales difficiles. Le crip doit surtout être prêt à garder son calme malgré son énervement, afin d’éviter que sa réaction (potentiellement sèche) ne déteigne sur l’image que son interlocuteur se fait des crips en général, afin notamment de ne pas renforcer les nombreux préjugés négatifs de ce type. Cela va aussi à l’encontre de ce que Shay Erlich appelle le « droit à la galère » (« right to struggle » en anglais, Erlich, 2019). Toute activité comportant un risque même limité peut entraîner des personnes extérieures à croire que le crip galère (les danseurs en fauteuil qui peuvent se remettre à l’endroit après une chute en fauteuil ayant été l’exemple de départ). Cette perception faussée donne une haute probabilité d’intervention non consentie, transformant une activité peu risquée en activité réellement dangereuse. Au lieu d’une chute à laquelle le crip est entraîné et dont il peut se rétablir seul, un marchant peut rattraper le fauteuil plus ou moins habilement, voire même le pousser pour aider le crip, fracturant ses doigts et le laissant incapable de se mouvoir pendant plusieurs mois. Ce type de risque peut mener à une forme d’impuissance apprise (Friedland et McColl, 1992) et augmente le coût de toute exploration spatiale du crip, pas uniquement par son incapacité, mais par les attitudes sociales auxquelles il se heurte, reflétant ici les arguments avancés dans les travaux sur le modèle social du handicap (Oliver, 2013).
3 Plusieurs niveaux d’espaces discrets.
3.1 Atteignabilité et discontinuités.
Nous avons vu que, à cause des contraintes sociales autour de l’autonomie, explorer l’espace qui nous entoure — ou même exister dans cet espace — est plus coûteux pour les crips. Cela jouera un rôle plus tard, mais il nous faut d’abord déterminer quelles parties de l’espace sont explorables tout court. Naturellement, tout lieu sur Terre n’est pas forcément atteignable, avec ou sans incapacité. On trouve ainsi de nombreux types de frontières qui rendent l’espace discontinu, quoique toujours globalement euclidien. On peut typiquement répartir ces frontières en trois groupes : topographiques (comme les rivières et les falaises), géopolitico-légales (comme les frontières entre États avec contrôle du passeport, ou les bases militaires) et architecturelles (comme un mur entre deux immeubles, où se déplacer d’un mètre à travers un mur ne peut être accompli qu’en sortant dans la rue pour aller dans l’autre immeuble) [14].
On peut alors observer deux propriétés. Tout d’abord, pour n’importe quel lieu se situant dans un espace peuplé, la plupart des marchants du pays ou de la région peuvent s’en rapprocher (avec une précision d’au plus quelques dizaines de mètres). Ensuite, ces espaces sont, jusqu’à un niveau de précision raisonnable, localement euclidiens. Dans notre contexte, cela veut dire que, pour presque toute paire de points (A,B), aller de A à B directement prend un effort similaire au fait d’aller de A à C si C est très proche de B. En d’autres termes, on a une loi similaire à l’inégalité triangulaire : aller de A à C ne coûte pas plus que d’aller de A à B, puis de B à C. Cela vient du fait que les discontinuités sont plutôt rares, et viennent surtout de raccourcis, comme quand deux lieus sont plus proches (temporellement) parce qu’une ligne à grande vitesse les relie. Les discontinuités de ce type n’affectent pas le coût total du trajet, mais plutôt la trajectoire. Par exemple, si un train va de A à B, le plus rapide pour aller de A à C (où C est pile entre A et B) est d’y aller à pied. Par contre, pour aller de A à C’, un point légèrement plus proche de B, le plus rapide est de prendre le train jusqu’à B puis de continuer à pied. Le coût temporel est légèrement plus bas, mais la trajectoire n’a rien à voir, comme on peut le voir illustré sur la Figure 2.
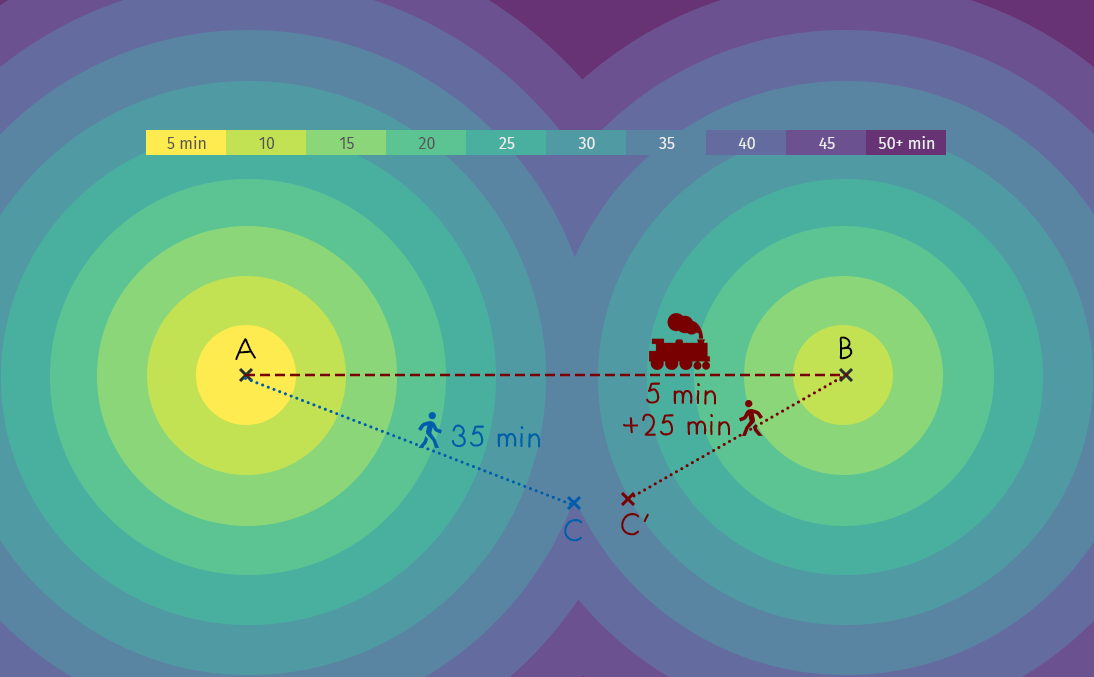
Schéma illustrant les coûts temporels selon le chemin pris entre A et les points C et C’ situés entre A et B. Les coûts sont continus, mais le chemin pris change radicalement selon la destination.
La question est alors : que se passe-t-il quand un crip explore les mêmes espaces ? Tout d’abord, il y a une première discontinuité simple qui s’applique aux roulants motorisés. Les batteries d’un fauteuil roulant ont une capacité très limitée [15], mettent jusqu’à douze heures à charger et ont des chargeurs souvent lourds et encombrants, ce qui fait que recharger au milieu d’un trajet est souvent un dernier recours. Cela implique que, à l’intérieur du rayon d’action du fauteuil, le coût du trajet est similaire au coût pour un marchant, mais que tout point au-delà de ce périmètre est inatteignable (ou alors avec un délai de plus de douze heures pour quelques kilomètres). On a donc une discontinuité nette par rapport à un marchant — ou à quelqu’un dans un fauteuil manuel, pour lequel le coût de chaque mètre supplémentaire augmente très lentement et de manière continue, généralement en fonction de la fatigue. On peut maintenant raffiner un peu cette propriété pour y incorporer des effets plus subtils. Tout d’abord, prendre comme rayon d’action la capacité maximale de la batterie n’est pas réaliste, car la roulante doit probablement rentrer chez elle en fin de journée, il faut donc diviser par deux ce rayon pour permettre ce trajet du retour. Deuxièmement, cette capacité maximale est variable et dépend de nombreux facteurs comme la température, la pente ou la vitesse moyenne utilisée, et les indicateurs de batterie sont extrêmement peu précis (une erreur de 50% n’étant pas rare si la batterie est déjà à moitié vide). On doit donc ajouter le coût supplémentaire de l’inquiétude quant à la capacité à rentrer chez soi. On se retrouve donc avec trois régimes. À l’intérieur d’un premier cercle — dont le rayon est à peu près du tiers de la capacité maximale — les coûts se comportent comme pour un marchant. Une zone floue va depuis ce tiers jusqu’à la moitié du rayon maximal, où le coût du déplacement augmente rapidement avec le stress, ensuite, une frontière stricte apparaît à la moitié du rayon, où la roulante subit une différence qualitative sur le coût, ne pouvant plus rentrer chez elle. Et au-delà du cercle ayant pour rayon la distance maximale, la crip n’a plus aucun moyen d’explorer l’espace.
On trouve ainsi notre première discontinuité, qui apparaît à une échelle moyenne (allant environ de 5 à 20 kilomètres). Regardons maintenant des effets à une échelle plus locale. Premièrement, on peut voir que le niveau de précision avec lequel un crip peut s’approcher d’un lieu est souvent plus bas. De nombreux bâtiments — notamment en Europe — n’ont pas d’ascenseurs suffisamment grands (ou fonctionnels) pour les roulants. Malgré des lois sur l’accessibilité implémentées lors des trois dernières décennies, de très nombreux commerces n’ont toujours aucune entrée accessible (Aiden et McCarthy, 2014), créant ainsi une frontière à l’entrée. Ce ne sont que de petites discontinuités locales, mais leur effet peut se faire sentir fortement dans certains contextes. Par exemple, en allant le long de la Neva à Saint Pétersbourg, on peut monter sur un trottoir et le longer pendant plus de 1500 mètres sans trouver le moindre moyen d’en descendre (parvenu à ce point, on accepte l’échec et on fait retour arrière en acceptant le détour de 3 kilomètres). C’est un cas extrême, mais devoir effectuer un détour d’au moins 1 kilomètre pour descendre sur la chaussée est fréquent dans presque toutes les grandes villes, de Washington DC à Luxembourg-Ville. Les détours plus courts (de quelques centaines de mètres) sont des occurrences quotidiennes, causées par une trottinette ou une poubelle oubliée sur un trottoir, ou bien des travaux de voirie (Lelyveld, 2019). Cela ne fait bien sûr qu’empirer l’effet précédent en aggravant les imprécisions (et donc le stress).
Le problème principal n’apparaît toutefois qu’à grande échelle, et concerne les voyages nationaux et internationaux. Théoriquement, presque tout lieu atteignable par un marchant l’est aussi par un roulant. Le problème est cependant d’y garder son autonomie une fois arrivé. Ainsi, un roulant peut potentiellement s’installer dans une voiture (sans son fauteuil) et conduire (ou plus probablement être conduit) jusqu’à la ville la plus proche. Une fois arrivé cependant, la capacité à explorer l’espace est réduite à néant par le manque de fauteuil. C’est une variation temporelle sur l’inégalité précédente. Aller de A à B, et ensuite à C, peut être arbitrairement plus coûteux que d’aller de A à C directement, même quand les deux sont très proches [16]. C’est dû au fait que l’on sacrifie sa capacité à se déplacer sur de petites distances pour parcourir la grande distance entre A et B. Cela donne naissance à des effets étranges. Par exemple, un roulant n’a aucune option décente pour aller de Paris à une ville comme Beaune (ville de plus de 20 000 habitants, normalement atteignable en train ou en voiture en moins de 3 heures et 25 euros). La gare n’ayant pas d’ascenseur, la seule manière d’y aller avec son propre fauteuil est d’affréter un taxi spécial. En comptant le temps d’organisation, aller à Beaune est ainsi plus coûteux (financièrement et temporellement) qu’aller à Berlin.
Cela nous amène à une première vision déformée de l’espace. On peut prendre un marchant dans n’importe quel endroit habité, et calculer le temps et l’argent qu’il lui faut pour atteindre le reste de la région ou du pays (en ignorant pour l’instant les problèmes de visa). Cette fonction sera presque partout continue, même si non-monotone (à cause des raccourcis mentionnés plus haut). La Figure 3 montre ainsi une telle carte isochrone pour un marchant parisien utilisant les transports en commun et partant d’un point proche du centre du XIème arrondissement. On peut voir certains raccourcis, comme le fait que les régions isochrones ne sont pas contiguës (la Défense, au Nord-Est, peut ainsi être atteinte en 20 minutes, moins de temps qu’il n’en faut que pour atteindre l’avenue qui y va depuis Paris). Malgré ces raccourcis, la carte est continue : il n’y a aucune transition où le temps de trajet passe soudainement de 30 à 50 minutes.
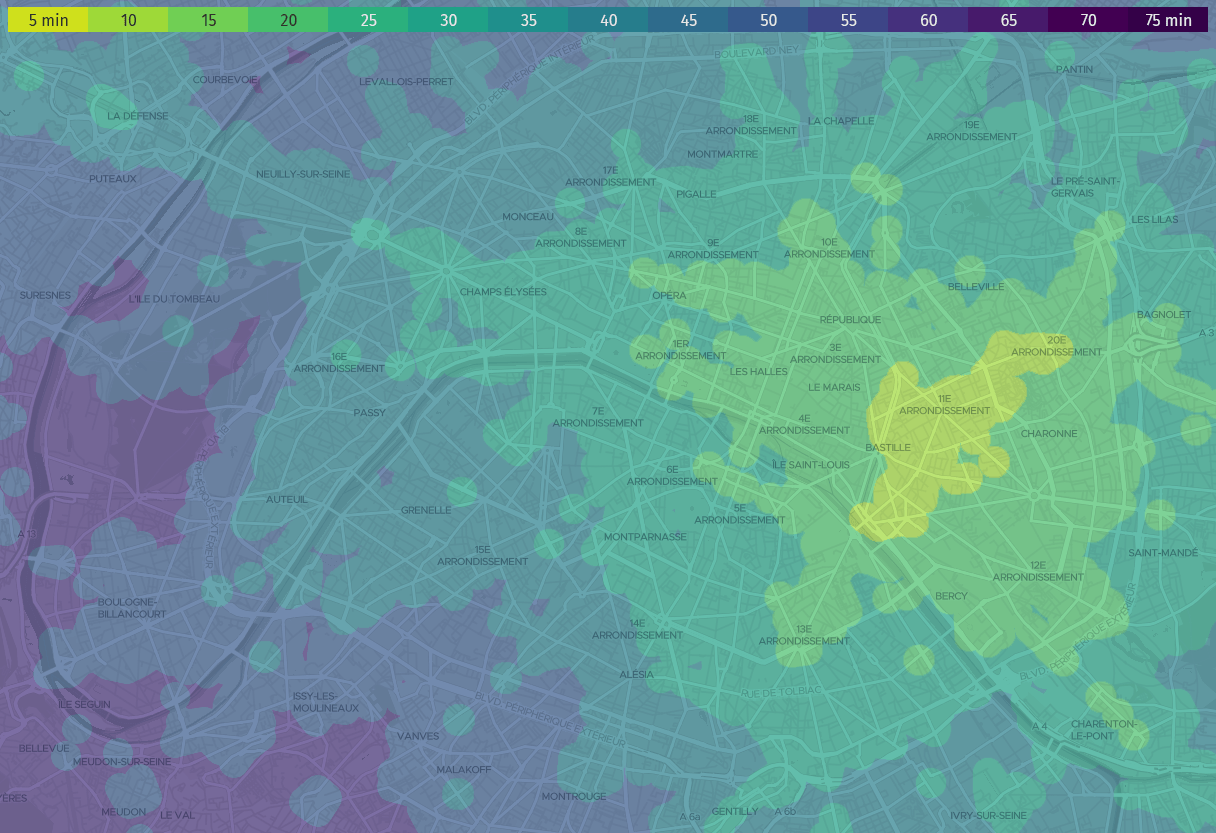
Carte isochrone montrant le temps qu’il faut à un marchant pour accéder à différents endroits de Paris en utilisant les transports publics depuis un lieu d’origine proche du centre du XIème arrondissement. Cette carte (ainsi que la suivante) fut compilée à la main en utilisant des données récupérées avec Targomo, avec l’aide de L. Gabasova.
On peut maintenant regarder la Figure 4, qui est aussi une carte isochrone mais pour une roulante avec quelques restrictions, correspondant à des contraintes pratiques fréquentes. La roulante part du même lieu, mais doit se restreindre à un rayon d’action correspondant à une demi-heure de batterie pour atteindre sa destination, tout en allant à la même vitesse moyenne qu’un marchant. C’est raisonnable car, si elle doit utiliser le fauteuil pendant le reste de la journée avant de rentrer, elle ne peut pas faire plus de quelques kilomètres pendant le trajet aller (Cooper et al., 2002). La deuxième contrainte est qu’elle ne peut pas utiliser de taxi, les services accessibles n’étant pas fiables (les délais de plus de deux heures avant de trouver un taxi étant fréquent, même en ayant réservé à l’avance). La troisième est que seuls les services considérés accessibles par l’administration française peuvent être utilisés, ce qui élimine une grande partie du métro. Enfin, cette carte ignore les bus car ces derniers souffrent de gros problèmes (équipement souvent en panne, occupants refusant de se pousser pour laisser les crips rentrer, chauffeurs refusant d’utiliser leur équipement ou d’aider le crip, parfois à cause d’ordres municipaux). Une liste exhaustive comporterait un dernier moyen de transport utile et parfaitement accessible qui n’est pas montré sur cette carte : le tramway [17] circulant autour de la ville [18]. Nous l’ignorons ici car sur la carte ne figure qu’une seule station atteignable par la roulante, et cela prendrait déjà près de 60 minutes et 2 changements. Sur la carte de la Figure 4, on peut ainsi voir deux nouveautés : des frontières nettes, notamment des frontières situées à l’intérieur de zones atteignables. Par exemple, des lieux à la frontière du Vème et du XIIIème arrondissement ne sont pas atteignables par la roulante, alors même qu’ils sont entourés dans presque toutes les directions par des lieux atteignables. La deuxième nouveauté est une discontinuité forte entre des zones où la roulante a le choix entre le fait d’y aller en roulant ou en RER. L’exemple le plus frappant est sur l’île de la Cité, dont l’extrémité est atteignable en roulant directement depuis le point de départ. L’autre extrémité de l’île est trop loin pour la batterie de la roulante, et le trajet correspondant implique donc de rouler 20 minutes dans une direction orthogonale pour prendre un RER, puis un changement vers un deuxième RER, et enfin la fin du chemin en roulant, pour un temps de trajet passant de 30 à 60 minutes pour quelques centaines de mètres. Cette discontinuité est visible par le changement brut entre le vert et le violet au centre de la carte.
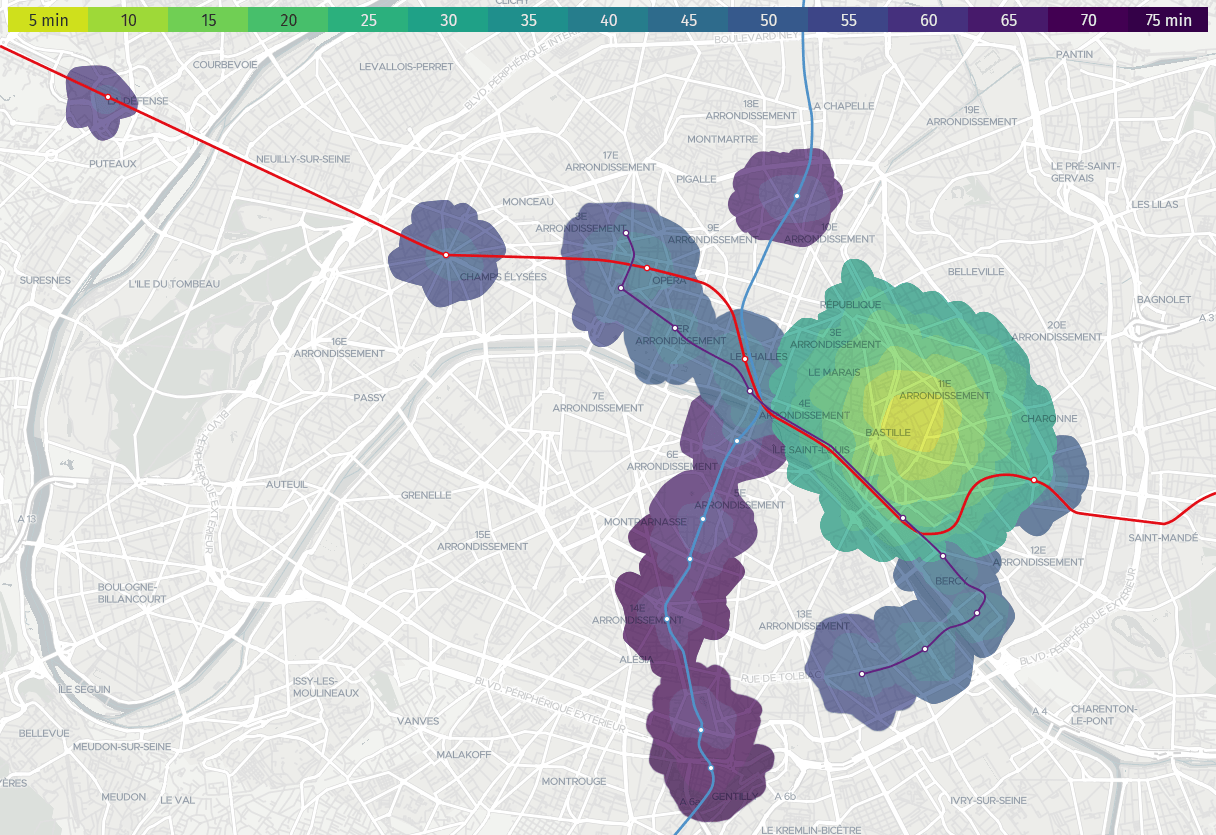
Carte isochrone montrant le temps nécessaire pour atteindre différents endroits de Paris à partir du même point de départ que sur la Figure 3, avec quelques contraintes : temps maximal d’utilisation de la chaise de 30 minutes en fauteuil, avec possible utilisation des réseaux ferrés accessibles.
Sur la Figure 3, 82% de la carte peut être explorée en moins de 40 minutes, une proportion qui chute à 6% sur la Figure 4, où même 30 minutes supplémentaires ne laissent la roulante explorer que 16% de la carte [19].
Nous nous sommes concentrés sur les roulantes ayant des fauteuils électriques, mais ces discontinuités sont également ressenties par d’autres types de crips. Par exemple, les personnes ayant des fauteuils manuels n’ont pas de limite fixe liée à la batterie. Par contre, elles font face à de nombreuses rues qui sont en pratique à sens unique à cause de leur dénivelé trop élevé. Et, si on suppose que certaines pentes sont arpentables avec un rude effort, il devient nécessaire de conserver ses forces afin d’être en état de surmonter ces obstacles, nous renvoyant aux mêmes difficultés que les roulantes en fauteuil électrique.
Le même type d’effet apparaît encore plus nettement à des échelles plus grandes, mais est plus dur à calculer précisément. Si on adopte la représentation du monde comme un archipel de métropoles — ou comme un ensemble d’archipoles (Poncet, 2017) — nos nouvelles contraintes donnent lieu à un raffinement de l’archipel. Ce raffinement est non-linéaire cependant, et la taille d’une ville n’est que peu corrélée aux coûts pour y accéder (par exemple, San Juan à Puerto Rico peut être beaucoup plus atteignable que San Francisco en Californie).
3.2 La liberté de changer de trajectoire.
Les arguments qui précèdent et les figures partent du principe que l’on prend toujours le chemin le plus court entre le point de départ et la destination, ou du moins qu’on essaie de prendre le chemin le plus court malgré les détours potentiels. C’est souvent vrai, et la plupart des marchants vont prendre le même chemin tous les jours pour aller au travail ou aux endroits qu’ils aiment fréquenter. Mais, et c’est un point essentiel, ils ont généralement le choix, quand ils se déplacent, de traverser à ce carrefour ou au suivant, de s’arrêter pour faire des courses ou d’aller boire un verre sur le chemin du retour. Sans s’embourber de considérations topologiques, il y a une raison à cela, liée à la nature profondément euclidienne de l’espace ambient. Grossièrement, si on prend deux chemins qui n’utilisent aucun raccourci non-euclidien — comme une ligne à grande vitesse — ou qui utilisent les mêmes raccourcis, on peut modifier légèrement un des chemins pour le rendre plus similaire à l’autre. Et on peut répéter l’opération, afin d’obtenir une gamme de chemins correspondant à une déformation presque continue du premier envers le second. Cette propriété nous permet de faire des petites modifications au chemin de départ sans rajouter de coût important (excepté le coût du détour choisi).
Considérons désormais une crip circulant dans la rue. Si elle connaît bien le quartier, elle sait à priori quels carrefours sont praticables, quels trottoirs ont des échafaudages gênants, quels bars ont des foules difficiles à traverser. Cette familiarité et le nombre d’obstacles potentiels se combinent pour donner une forte tendance à suivre son chemin habituel (Kitchin, 1998). Elle pourrait essayer un chemin alternatif, mais ces derniers sont rares. De plus, un chemin qu’elle maîtrise moins peut présenter un obstacle imprévu sur un trottoir, ce qui, combiné avec la difficulté à descendre du trottoir, peut la forcer à rebrousser chemin pour revenir à son chemin habituel. Si on prend en compte les effets mentionnés précédemment sur le stress [20] d’être en public ou de faire attention à sa batterie en prenant des routes non optimales, il y a de grands avantages à éviter toute exploration superflue. Cela ne concerne pas que les roulants : les personnes ayant des difficultés visuo-spatiales peuvent connaître leur chemin habituel suffisamment pour reconstruire et naviguer dans cet environnement en 3D, alors qu’elles peuvent être fortement désorientées dans des endroits moins familiers, où leur vitesse de marche chute alors drastiquement (Antonakos, Giordani, et Ahston-Miller, 2004).
On peut ici prendre inspiration du modèle des capabilités qui analyse les relations entre personnes ayant une incapacité et le reste de la société. Ce modèle étudie comment les habitudes de la société affectent l’expérience de vie des crips, ainsi que leur liberté d’atteindre leurs buts dans leurs systèmes de valeurs idiosyncratiques (Burchardt, 2004). Comme dit ci-dessus, les marchants n’utilisent peut-être que rarement cette liberté d’explorer leur environnement immédiat, mais cette liberté même implique qu’ils n’ont pas besoin d’y réfléchir. À l’opposé, l’incapacité à dévier du chemin habituel peut être fortement ressentie par le crip, surtout quand il se déplace au sein d’un groupe de personnes ne partageant pas ses contraintes. C’est encore plus extrême pour les roulants dépendant de quelqu’un pour les pousser — que ce soit parce qu’ils sont soudain trop fatigués pour se déplacer par eux-mêmes ou parce qu’ils n’ont pas les moyens d’acheter un fauteuil électrique. Dans ce cas, ils ne peuvent même pas contrôler directement là où ils vont, alors qu’ils restent — d’une certaine manière — responsables de ce qu’il se passe [21]. On a ici un coût qui apparaît, causé par la négation de liberté et d’autonomie, et la nécessité de constamment avoir conscience de ces limites, alors même que la plupart des individus n’exercent pas la liberté dont ils disposent.
3.3 Déplacements de point à point.
Comme nous l’avons établi, les crips ont des coûts plus élevés liés à l’exploration des espaces dans lesquels ils évoluent. Ces coûts peuvent venir de faits inévitables — comme le fait de se propulser sur un fauteuil manuel est exténuant. Ils peuvent aussi venir du stress, de la portée limitée, et du risque permanent d’avoir à faire face au harcèlement et à la négation de son autonomie. Cela entraîne le crip à n’aller que depuis des lieux bien définis — et familiers — à d’autres lieux similaires. On peut étendre ici notre argument précédent. En partant du principe que les crips ne peuvent atteindre qu’un ensemble très limité de lieux en transports en commun — comme illustré sur la Figure 4 — on peut se demander quelles sont les options restantes. Il y en a quelques-unes, la première étant de laisser de côté la liberté d’explorer l’espace afin d’utiliser une voiture standard en laissant son fauteuil chez soi. Cela rend le voyage de A à B beaucoup plus facile et moins cher, avec la contrepartie de ne pouvoir se déplacer autour de B librement, et de devoir revenir à A pour retrouver son autonomie. Comme le crip est rarement la personne qui conduit, il n’a que rarement la liberté de choisir le chemin en voiture [22]. La deuxième est d’utiliser des services spécialisés — comme Paris Accompagnement Mobilité ou PAM à Paris — qui ne prennent généralement que des clients réguliers selon le même trajet chaque jour à la même heure (typiquement pour se rendre à son bureau ou à son école). Quand ces services autorisent des trajets irréguliers, il est souvent nécessaire de réserver jusqu’à plusieurs semaines à l’avance — quand ils sont encadrés par le gouvernement — ou alors de payer des coûts parfois exorbitants [23] — quand on veut une garantie de service auprès d’un fournisseur privé. Cette nécessité de réserver à l’avance est extrêmement fréquente, et la plupart des transports en commun demandent un préavis allant de 1 heure à 48 heures. En suivant la terminologie de Tim Ingold (Ingold, 2007), alors que les marchants se comportent souvent en itinérant, appréciant le mouvement dans l’espace pour lui-même, le crip est à l’extrême du passager, « ne voyant dans le passage du temps non pas un potentiel de croissance organique mais une limite mécanique de son équipement » [24].
Il semble alors, à cause des coûts plus élevés et des contraintes supplémentaires, que les crips se déplacent le plus souvent de point à point, que ce soit à l’échelle du quartier ou à celle du voyage national et international (même si les voyages internationaux ont tendance à être de point à point pour les marchants, nécessitant à priori de prendre le train ou l’avion [25]). Pour revenir à la deuxième section, on peut aussi appliquer cette observation à l’échelle du domicile ou du bureau. Dans un tel environnement, les habitudes sont omniprésentes, que ce soit pour trouver la manière optimale d’aller de son fauteuil aux toilettes (avec des mouvements algorithmiques), ou à la tendance générale à ne se poser qu’en deux ou trois endroits chez soi où l’on a optimisé autant que possible son confort.
Nous avons vu que l’expérience spatiale des crips est particulière, allant de perceptions idiosyncratiques de soi et de son espace personnel aux restrictions sur les lieux où ils peuvent aller, sur les manières d’y aller, et sur les coûts associés (Seguna, 2015). Cela mène à une discrétisation de l’espace vécu, où les crips sont ici où là, avec un ensemble fini d’états possible, ce qui reste vrai à différentes échelles. Étonnamment, cette discrétisation de l’espace s’étend naturellement à une discrétisation du temps, comme nous allons voir dans la dernière section.
4. Temporalités discrètes et la théorie de la cuillère
Jusqu’ici, nous avons analysé comment les restrictions sur l’autonomie et la mobilité peuvent affecter les prérequis nécessaires pour explorer l’espace en tant qu’agent indépendant. Il semble alors intéressant de caractériser la façon dont la discrétisation affecte non seulement les spatialités des crips, mais aussi leurs temporalités. Un traitement détaillé irait au-delà des limites de cet article, mais il semble nécessaire d’introduire trois effets centraux affectant ces temporalités crips.
4.1 Autonomie et discrétisation du temps
Comme établi dans la section 2, l’absence d’autonomie joue un rôle important dans l’expérience de vie crip. Ainsi, par son choix de mettre des picots sur son fauteuil, Sarah Waters ne fit pas que revendiquer son autonomie, elle commença surtout à défendre son droit d’avoir son propre temps seule, sans être dérangée par des passants bienveillants mais ignorants. L’autonomie dont nous parlons ici peut se concrétiser par le pouvoir de choisir où l’on va, mais aussi de choisir la temporalité de ces déplacements. Les transports en commun mentionnés précédemment ont presque toujours des règles strictes sur leurs horaires. Voyager en tant que crip n’implique pas uniquement un coût temporel plus élevé, cela limite aussi les choix disponibles (Pyer et Tucker, 2017). Par exemple, la plupart des compagnies ferroviaires (dont la SNCF) n’ont au plus qu’un emplacement acceptant des fauteuils roulants par train (pour des trains de 500 passagers, représentant ainsi une proportion de places disponibles bien inférieures à la proportion de personnes en fauteuil). Cela limite les possibilités de voyage : il faut tenir compte qu’une autre crip a potentiellement déjà réservé l’unique place du train, et le voyage en groupe de crip devient ainsi presque impossible (Lum, 2017). Au-delà des arguments potentiels que l’on pourrait présenter sur l’intérêt économique et l’accessibilité comme droit fondamental, ces facteurs ont des lourds impacts sur les modes de socialisations crip. Si l’on se rappelle que les crips sont souvent isolés en pratique, et passent une proportion importante de leur temps entourés par d’autres crips (rarement par choix conscient), empêcher le déplacement en groupe revient presque à empêcher le déplacement tout court. Il y a heureusement une bienveillance non négligeable du reste de la population. Cela permet de gérer les catastrophes et imprévus, de l’hôtel qui réorganise ses réservations de chambre pour accueillir un roulant au groupe de passants se portant volontaire pour porter un fauteuil et son occupant en haut d’un escalier. On pourrait appeler ce modèle « l’accessibilité en tant que faveur », et il a des conséquences pernicieuses. Tout d’abord, un crip ne peut demander de l’aide ou un traitement de faveur qu’un nombre limité de fois (même si l’aide est nécessaire et ne sert qu’à compenser une erreur venant d’un interlocuteur ou une administration incompétente). Au-delà de cette limite (floue), il est difficile au crip de ne pas attirer l’attention, de ne pas se sentir être un fardeau sur son entourage, voire d’être accusé d’être ce fardeau. Ainsi, même si la crip peut décider d’exiger qu’on adapte de manière raisonnable l’espace qui doit l’accueillir, il y a toujours une question non-triviale de choisir quand cette demande de traitement de faveur n’est pas trop coûteuse, mentalement et socialement. Par exemple, une fois son fauteuil monté à un étage sans ascenseur par un groupe de collègues serviables, le crip peut décider de sauter le déjeuner au lieu d’avoir à demander de l’aide pour descendre et remonter. Ce raisonnement est sûrement partiellement causé par de l’autocensure, mais les conséquences graves en cas de refus d’aide rendent ces précautions plutôt rationnelles.
L’impulsivité n’est alors pas une option : toute décision relative au mouvement doit être réfléchie, tout voyage doit être prévu et organisé au moins plusieurs jours en avance, avec des marges de manœuvre pour être sûr de ne pas se retrouver bloqué en cas de problème. Combiné aux points précédents sur la difficulté d’explorer l’espace entourant le crip, cela peut faire de sa vie une routine immuable. Cette routine est composée d’un ensemble fini de lieux — où le crip est généralement dans la même position — et des trajectoires fixes entre ces lieux, entamées aux mêmes heures et avec les mêmes marges d’erreur, séparant ainsi les journées en périodes discrètes. Cela réduit alors le potentiel de sérendipité, même dans les milieux les plus urbains (Lévy et Lussault, 2013).
4.2 Discrétisation des tâches et théorie de la cuillère
Jusqu’ici, la plupart des exemples traitaient en particulier des roulants. Même si les arguments s’appliquent souvent aux crips ayant d’autres types d’incapacité, généraliser serait prématuré. Quand on parle de discrétisation temporelle cependant, la communauté des personnes ayant des maladies chroniques est la source d’une des théories les plus développées sur les temporalités altérées. La théorie des cuillères, introduite en 2003 par Christine Miserandino dans un essai éponyme sur son vécu avec le lupus, fut une première contribution dans cette direction. Il existe désormais de nombreuses variantes de ce modèle, mais le principe général est simple (Miserandino, 2003). Chaque action, aussi triviale soit-elle, a un coût fixe, et le budget total disponible chaque jour est fortement limité. Miserandino introduit alors l’unité de la « cuillère » comme unité fondamentale d’énergie correspondant à la force physique et mentale nécessaire à l’accomplissement d’une de ces actions. Même si ce modèle semble trivial, c’est la discrétisation de toutes ces actions qui en fait la richesse. Par exemple, une personne valide moyenne ne considère pas forcément le fait de prendre une douche comme une action coûteuse, voire comme une action requérant un choix conscient. Mais, à mesure que chaque action devient plus coûteuse, la douche doit elle-même être décomposée en plusieurs étapes toutes fatigantes ou douloureuses (comme s’habiller ou se déshabiller, en plus de se laver). Une crip peut alors se rendre compte qu’il ne lui reste plus assez d’énergie pour accomplir ses objectifs de la journée, et que s’il lui reste un appel téléphonique important à faire et un dîner à manger, il sera peut-être nécessaire de sacrifier l’un des deux (même si cela aurait été plaisant, l’énergie n’étant juste pas disponible). Il est parfois possible de dépasser ses limites, mais cela entraîne un coût en fatigue et douleur pouvant durer plusieurs jours. Alors que la plupart des personnes seraient capables d’absorber les coûts des sous-tâches et donc d’en ignorer les coûts accessoires (en considérant la douche comme une action unique), la décomposition — nécessaire — de la crip donne à chaque sous-tâche un coût réel dû à sa conscientisation.
La nécessité de prévoir la gestion de ces coûts supplémentaires donne naissance à des problèmes d’optimisation qui ont aussi un coût, en forçant le crip à prendre fréquemment des décisions difficiles. Comme Miserandino le dit elle-même : “J’ai expliqué que la différence entre être malade et être en bonne santé était de devoir faire des choix ou de devoir penser exprès à des sujets que le reste du monde peut se permettre d’ignorer. Les personnes en bonne santé ont le privilège d’une vie sans choix, une chance que la plupart considère comme un acquis” [26].
Cette théorie a déjà été étendue de multiples façons, parfois par une analyse plus poussée concernant les personnes ayant des maladies chroniques ou des handicaps invisibles, ou bien sur ses applications parmi les communautés ayant des handicaps psychiques. Une analyse des différents modèles mériterait son propre article (au minimum), mais une évolution semble particulièrement riche : la théorie des spell-slots — emplacements de sorts en français, terme provenant du jeu Donjons et Dragons. Cette théorie incorpore des différences qualitatives entre les actions. À la place de cuillères fongibles, le crip possède un certain nombre d’actions de difficulté variable. Par exemple, se brosser les dents peut être une action simple, alors que cuisiner un repas complet serait une action complexe. L’intérêt de ce modèle est qu’il est possible d’utiliser une action complexe du budget pour faire une tâche simple, mais pas réciproquement. La non-fongibilité des budgets devient alors une autre source de complexité d’optimisation et de choix difficiles.
5. Espaces, temps, identités discrètes ?
Les réglementations arbitraires, les coûts supplémentaires dus aux contraintes matérielles, l’incertitude permanente, le stress de savoir que son autonomie peut être remise en question à tout moment, ou bien la complexité d’assurer sa propre sécurité tout en gérant les contraintes précédentes, tout semble avoir tendance à réduire le vécu des crips à un ensemble discret de lieux et de temps, sans liberté de faire des choix immédiats.
Cela nous mène aussi à un paradoxe apparent. D’une certaine façon, les crips vivent l’espace comme beaucoup plus euclidien que les autres : face à une marche, la roulante verra un obstacle parfaitement euclidien qu’elle ne peut franchir, ne pouvant se déplacer que sur des surfaces continues. Le marchant de son côté sera capable d’introduire une discontinuité dans sa trajectoire (les traces de pas sont discrètes et non pas continues, contrairement aux traces de pneus), et ainsi d’ignorer la discontinuité de l’espace. L’extrême euclidianité est alors ce qui crée toutes ces frontières et discontinuités locales pour les crips, donnant naissance, à plus grande échelle, à une perception de l’espace entièrement réticulée.
Durant cet article, nous nous sommes concentrés sur les incapacités motrices et sensorielles, mais des parallèles sont réalisables avec de nombreuses autres minorités similaires — qu’elles soient considérées comme handicapées ou non. Par exemple, les temporalités discrètes seraient un champ d’étude potentiellement très riche au sein des « systèmes multiples », les personnes qui identifient avoir plusieurs personnalités distinctes, le plus souvent dans le contexte de troubles dissociatifs de l’identité (Ribáry et al., 2017). Dans ce contexte, les discontinuités fortes au sein de la mémoire voire de la conscience même posent un risque à la fois à l’autonomie et à continuité de la volonté.
